



 Contact form
Contact form
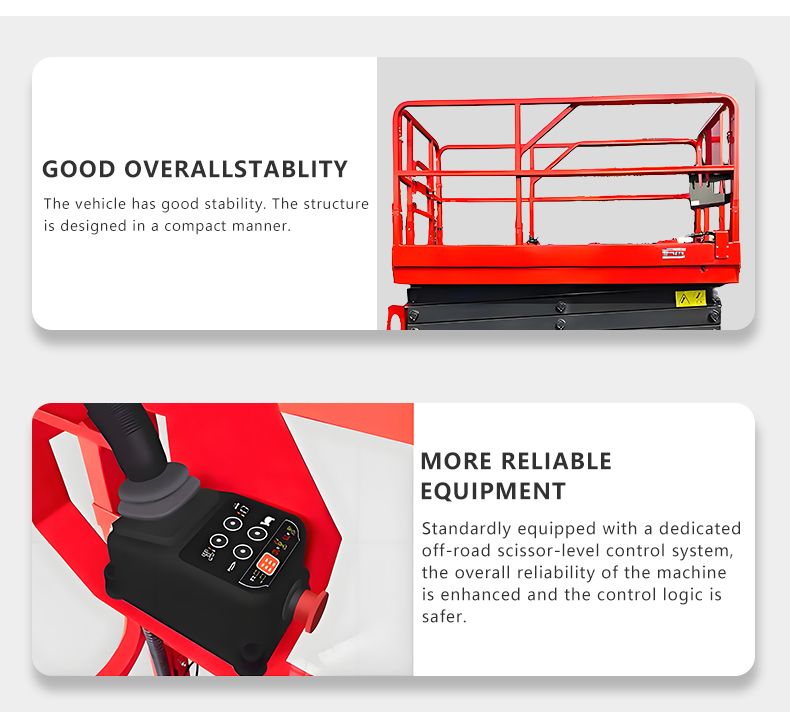
The self-propelled crawler jib aerial work platform is specially designed for indoor and outdoor high-altitude operations,
combining flexibility and stability. It adopts a scissor-type lifting structure, equipped with an efficient hydraulic system
and imported components. The lifting is smooth, with low noise, and it supports continuous self-movement, steering,
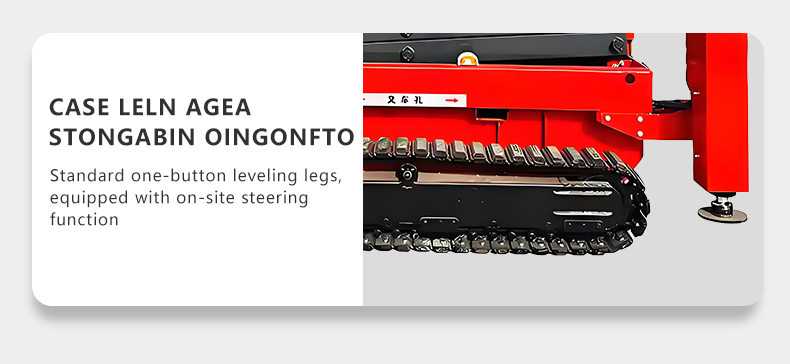
and stepless speed control. A single person can complete the entire process of lifting, moving, etc. The crawler chassis
enhances the adaptability to complex ground conditions, and is paired with anti-slip non-slip tires, protecting the ground
and allowing smooth passage. It is equipped with multiple safety protections, including explosion-proof pipe devices,
emergency descent switches, and intelligent program control, ensuring operational safety. The platform can be extended
and expanded to cover various scenarios such as advertising installation, equipment maintenance, and venue maintenance.
It achieves zero emissions with environmentally friendly DC power and is suitable for environments such as airports,
shopping malls, and workshops. This equipment replaces traditional scaffolding, significantly improving efficiency and
reducing overall costs, making it an ideal solution for modern high-altitude operations.



The self-propelled crawler jib aerial work platform, with its flexible and maneuverable characteristics and automatic
walking feature, is widely applicable for high-altitude operations both indoors and outdoors. Its compact body can
replace traditional scaffolding and can easily handle scenarios such as curtain wall cleaning, advertising installation,
and street lamp maintenance. It is particularly suitable for large-scale continuous operations in airports, stations,
shopping malls, and factory workshops. The DC power design takes into account both environmental protection and
low noise, allowing for lifting and turning operations by a single person, significantly improving efficiency and reducing
labor costs.


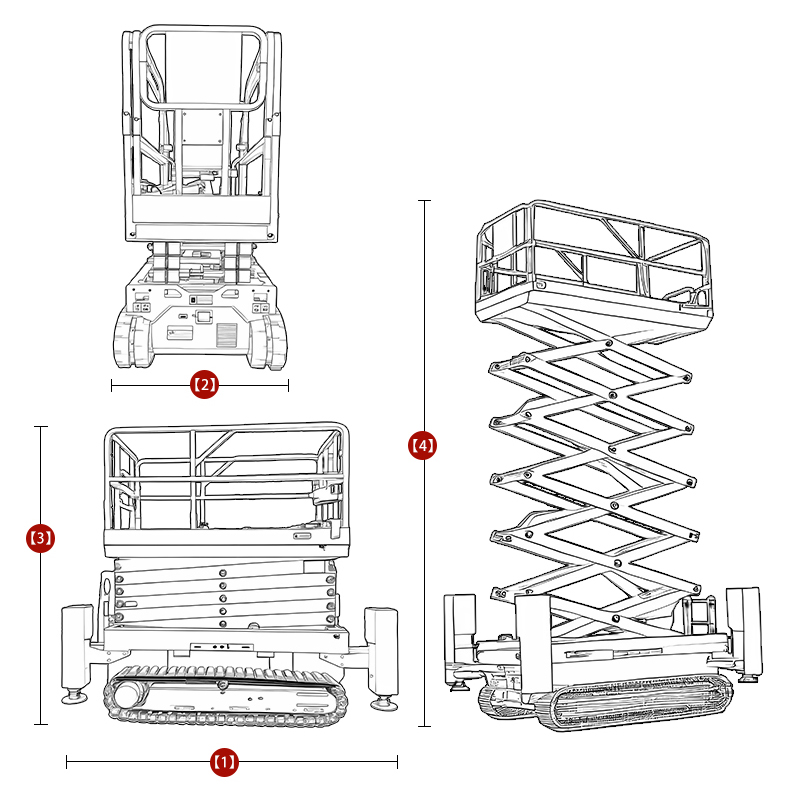
| Model | MPGTJZ0608 | MPGTJZ0810 | MPGTJZ1012 | MPGTJZ1214 | MPGTJZ1416 |
| Size | |||||
| Maximum working height | 8.0m | 10.0m | 12.0 m | 14.0 m | 15.8m |
| Maximum plaform height[4] | 6.0m | 8.0m | 10.0m | 12.0m | 13.8m |
| Overall length[1] | 2.78m | 2.78m | 2.78m | 2.78m | 3.18m |
| Overall width[2] | 1.57 m | 1.57m | 1.57 m | 1.57 m | 1.60 m |
| Overall height(unfolded fence | 2.35m | 2.47 m | 2.64 m | 2.74 m | 2.74m |
| Overall height (folded fence)[3] | 1.8m | 1.9m | 2.1 m | 2.2m | 2.2m |
| Work platiom dimersions(length×widh] | 2.27*1.13m | 2.27*1.13m | 2.27*1.13m | 2.27*1.13m | 2.63*1.13m |
| Platorm extension size | 0.9m | 0.9m | 0.9m | 0.9m | 0.9m |
| Whelbase | / | / | / | / | / |
| Ground clearance | / | / | / | / | / |
| Performance | |||||
| RATED LOAD | 450 kg | 450kg | 320 kg | 320 kg | 227 kg |
| Extende platom ated lad | 113 kg | 113 kg | 113 kg | 113 kg | 110 kg |
| Machine travel speed(retracsted state] | 1.8 km/h | 1.8km/h | 1.8km/h | 1.8 km/h | 1.8km/h |
| Machine travel speed (Efing state] | 0.0 km/h | 0.0 km/h | 0.0 km/h | 0.0 km/h | 0.0 km/h |
| Rise/fal time | 3-5m/min | 3-5m/min | 3-5m/min | 3-5m/min | 3-5m/min |
| Gradeabilfty | 25% | 25% | 25% | 25% | 25% |
| Macimum allowable angle for work (fnont and backo | 3° | 3° | 3° | 3° | 3° |
| Maccimum allamable angle for work (aneran | 1.5° | 1.5° | 1.5° | 1.5° | 1.5° |
| Drive | Electric drive | Electric drive | Electric drive | Electric drive | Electric drive |
| Tire | Steel track | Steel track | Steel track | Steel track | Steel track |
| power | |||||
| Power source | 8*6V/220AH | 8*6V/220AH | 8*6V/220AH | 8*6V/220AH | 8*6V/240AH |
| Lifing motor | 48V/4.5KW | 48V/4.5KW | 48V/4.5KW | 48V/4.5KW | 48V/4.5KW |
| Waking motor | 48V/4KW | 48V/4KW | 48V/4KW | 48V/4KW | 48V/4KW |
| Charger | 48V/30A | 48V/30A | 48V/30A | 48V/30A | 48V/30A |
| Weight | |||||
| Whole machine weight | 2770 kg | 2970 kg | 3270 kg | 3680 kg | 3990 kg |









{kind=link}